產品與解決方案/PRODUCT AND SOLUTIONS
少用電 用好電 再生電 存儲電 防爆電
解決方案
自動控制系統的PID調試
1
概述
在現代工業化生產中,大型的自動控制領域正逐步推廣,通過與變頻器、PID調節器、現場信號采集等的有機結合,自動控制系統正向更大、更廣的領域擴展,不但在較常見的風機、水泵、空壓機上應用較多,而且在制冷系統、油田油罐恒液位、輸油恒流量等各個領域都在拓展。但由于各種原因,自動控制系統的調節,尤其是參數的調整,并不十分令人滿意,存在著穩定性差、波動大,調整不及時等諸多問題。因此,進行有關這方面的研究,探討一下究竟在什么情況下,如何正確快速的調整參數,使系統盡可能快的進入自動控制的穩定過程,是眾多參與自動控制過程控制的同行們急于解決的問題,這關鍵在于大家集思廣議,多總結經驗,多思考,掌握調試方法,針對不同的現場、不同的負載,進行完善的調試,達到理想的控制過程。
2
自動控制的概念
所謂的自動控制,簡單的說就是將被控對象的全部或部分的物理量通過不同的采集方法,反饋到控制單元,由控制單元對反饋量進行處理,以達到控制對象按人們期望的要求穩定運轉的目的。
這個過程需要以下基本的組成部分:

其中控制單元是整個控制系統的核心,不論系統是否實現自動控制,是否對被控對象采集信號,是否反饋到控制部分,都是十分重要的。若控制單元工作不正常,不但自動控制難以實現,系統根本就無法運行。在現代控制領域中,較常見的控制單元就是變頻器,雖然以前的控制系統即工頻控制系統還可能部分的存在,但由于能耗浪費嚴重等諸多問題,絕大多數的領域都已經實現了變頻控制。而要實現自動控制,較簡捷的方式也是選擇變頻器,因為例如在水泵的控制中,被控物理量管道壓力或流量,采集后要傳到控制單元,由控制單元根據流量或壓力調整變頻器的頻率,以調節電機轉速,達到流量或壓力滿足要求的目的。若采用工頻控制,控制單元的頻率無法調整,也就談不上調節電機轉速,流量或壓力也就無法調節。雖然按工頻控制可調節閥門達到調節流量或壓力的目的,但這都是手動調節,無法實現自動控制。所以現在的控制單元首選是變頻器。
被控對象也就是通常所說的負載,如風機、水泵、空壓機、壓縮機等等,這是工業領域不可缺少的部分,以實現對風量、水量及壓力、溫度的控制。
數據采集包括對現場的物理量的采集,如風量、風壓、水量、水壓、溫度,有的稱管道壓力,有的稱管線流量,有的采集的是液位,有的采集的是負壓,如風機,有的采集的是進口,有的采集的是出口,但不論怎樣采集,都不外乎這幾種。這個信號采集也非常重要,即使不用自動控制,這些物理量也是必須采集的。作為一個控制系統,若流量或壓力超出了要求,就可能出現危險,如水泵的壓力,對一個水泵控制系統而言,其設計的管線壓力都是有限的,即有一定的指標控制。若管線壓力超出了指標要求,就有可能使管線爆裂,造成難以估計的損失,所以在控制系統中,要隨時觀察管線壓力的變化,超出指標后要及時停機,或降低電機轉速,以保護管線不受損害。現在的控制系統中大部分都設定了超限保護,就是這個原因。
數據的采集方法有很多種,如采用壓力表,壓力傳感器,流量計,壓力計、溫度變速器等,多數是0~5V電壓或4~20mA電流信號,可以傳送到變頻器,為變頻器所能接受。壓力表要采用遠傳式壓力表,即滑線變阻式,以可變電阻通過變頻器上的電源而變成電壓信號來便于控制。
數據處理就是對所采集的數據進行分析、運算、處理等,以通過與目標值即我們的期望值相比較,如一個恒壓控制系統,要求壓力穩定在3MPa,這個值就是期望值即目標值,實際值與目標值相比較,通過比例、積分、微分的運算,然后送到變頻器,調節變頻器的頻率,達到自動控制的目的。這個比例、積分、微分的運算,就是我們通常講的PID控制。若沒有PID控制,就是常規的手動控制,即手動調節變頻器的頻率,達到實際值與目標值一致。這在工程上通常稱為開環控制,而PID控制即自動控制通常稱為閉環控制。開環與閉環的區別就在于有無PID的自動調節。
3
PID調節器的分類
在自動控制的調節中,作為實現自動控制的PID調節器,主要可分為兩種:
一是變頻器本身帶有PID調節器,通過參數設置,從變頻器的控制端子上連接反饋信號,從面板或控制端子上設定目標值,通過內部的PID參數調節,實現自動控制。這種方式采用內部控制,優點是不用增加別的器件,直接進行控制,投資少,缺點是PID的調節精度不高,對于一般的控制精度不高的場合可達到要求,對于要求精密度較高的則難以滿足工況需求。另外,若采用手、自動切換的場合,則不好實現。必須再重新設置參數,改成開環控制才能實現,比較繁瑣。如有的系統要求開始運行時采用手動調節,待系統的實際運行參數與目標值接近一致時,再用閉環運行,由被控物理量自動調節;還有的是在運行中反饋環節出現問題,如壓力傳感器或流量計出現問題,不能正常工作,或儀表線出現斷線,無法實現自動控制,在不能查出原因的情況下,只能用手動先暫時運行,這種情況該方案就比較麻煩,要重新設置參數,才能實現手動控制。而有的用戶對參數設置不太熟悉,就會造成比較困難的局面。
二是采用單獨的PID儀表,將傳感器傳過來的壓力或流量信號先送到PID的信號輸入端,經PID儀表處理后,經過比例、積分、微分的運算,其信號輸出端再連接到變頻器的信號輸入端,這樣對整個系統而言是閉環控制,而對于變頻器而言,是開環運行。這種方式避免了第一種方式的缺點。變頻器可接成開環和閉環兩種控制方式,通過一轉換開關實現,用PID的輸出信號是閉環,不用PID的信號,而采用變頻器本身的控制信號則是開環,這樣就用一個開關方便的實現了兩種控制方式,在轉換時十分方便。再一個PID調節儀是專用的自動控制調節器件,對于簡單或復雜的控制系統,都可以比較精密的進行控制,在風機、水泵或空壓機的運行中都可以得到較好的控制效果,因此,這種方式還是比較好的。
現在通用變頻器大部分都內置了簡易PID功能,有的只有PI功能,只能進行簡易的閉環控制,因此我們建議在做自動控制系統時,最好還是采用第二種方式,即外加PID的方式,既可以方便的實現手、自動轉換,又可以進行精密的控制,比較方便,雖然投資有所增加,但控制功能增強,尤其對于變頻器而言,這種方式工作于開環控制,通過配合調整升頻、降頻時間,也可達到較好的控制效果,對變頻器也有利。
4
PID調節器的工作原理
對于一個控制系統而言,要想實現理想的控制效果,就要采用一定的控制手段,使我們預期的目標值,與系統實際運行的工作值相一致,這就是控制系統最基本的要求。
但是目標值與實際值總是存在差異的。由于實際負載的增減,用量的多少,不可避免的造成實際值將偏離目標值,有時大于目標值,有時小于目標值,二者的差值正是自動控制所要控制的對象。
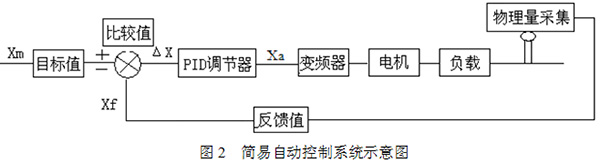
如圖2所示是一個最基本的自動控制系統圖,在這里我們假設目標值為Xm,反饋值為Xf,其差值為ΔX,則有:
ΔX=Xm-Xf
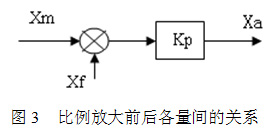
由于傳感器本身傳遞的信號一般是比較小的,一般是0~5V或4~20mA的信號,上式的差值也是很小的,要用這一差值去調節變頻器的頻率,顯然是不可能的。必須進行放大,而這就是PID調節器的比例環節,即將該差值信號成比例的進行放大。假設這一比例值為Kp,一般稱為比例增益。設PID的輸出信號(即變頻器的輸入信號)為Xa,則
Xa=KpΔX=Kp(Xm-Xf)
也就是
ΔX=(Xm-Xf)=Xa/Kp
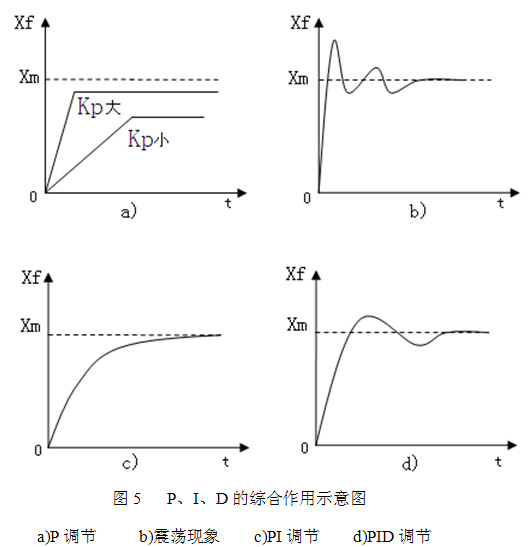
上述關系如圖3所示
在上式中,Xa即目標值一般是不變的,顯然,Kp越大,Xm-Xf就越小,Xf就越接近于Xm,如圖5的(a)所示。
這里,Xf只能無限接近于Xm,而不能等于Xm,若Xf等于Xm,則由上式,
Xa/Kp=0,
Kp就將等于無窮大,這是永遠也做不到的。
就是說,二者之間總有一個差值,通常稱為靜差,用ε表示。顯然靜差值越小越好。
在專用PID調節器中,比例增益的大小常常是通過“比例帶”來進行調節的。所謂比例帶,就是按比例放大的區域,用P表示,P為比例增益的倒數,即
P=1/
Kp
如圖4所示。
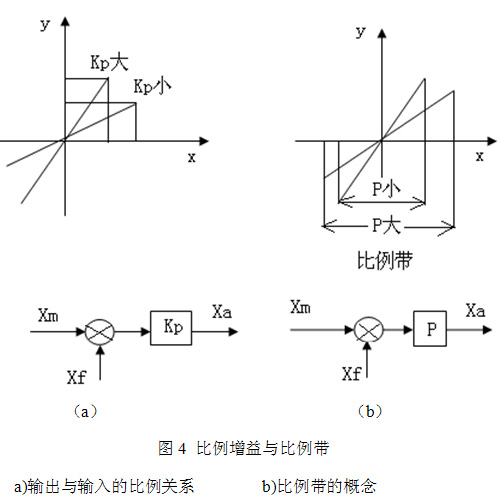
由圖4知,比例帶P越小,相當于比例增益Kp越大,在專用PID調節儀表中,大部分都是調節比例帶P的,所以一般是P值越小越穩定,但也有直接調節Kp的,比較少,一般是變頻器內置的PI功能才具有。
比例增益環節的引入,又出現了新的矛盾,一方面,要減小靜差,就要盡量增大比例增益,但由于系統有慣性,比例增益增大后,又會引起超調,使系統的被控量忽大忽小,引起系統振蕩,如圖5(b)所示。這就要用到積分環節I。
引入積分環節I的目的是:
使給定信號Xa的變化與乘積Kp(Xm-Xf)的積分成正比。
就是說,盡管Kp(Xm-Xf)一下子增大(或減小)很多,但Xa只能在“積分時間”內逐漸的增大或減小,從而減緩了Xa的變化速度,防止了振蕩。積分時間越長,Xa的變化越緩慢。只要偏差不消除,Xm-Xf≠0,積分就不停止,從而有效的消除靜差。如圖5(c)所示。
但積分時間太長,又會發生在被控量急劇變化時,被控量難以迅速恢復的情況。這就要用到微分環節D,微分環節的作用是:可根據偏差的變化趨勢,提前給出較大的調節動作,從而縮短調節時間,克服了因積分時間太長而使恢復滯后的缺點。如圖5的(d)所示。
5
PID的調試方法
根據以上對控制原理的分析,我們就可以對一個自動控制系統進行調試,通過參數的調節,達到穩定運行的目的。
對于一個系統而言,有的是要求在Xm-Xf>0,即Xm>Xf時,變頻器運行頻率提高,即電機運行速度加大,而Xm0,即Xm>Xf時,要求變頻器的運行頻率降低,即電機運行速度減慢,這種作用就稱為反作用(有的書上也稱為正作用),如恒溫控制,當房間溫度低時,要求壓縮機降低速度,使致冷作用減弱,房間溫度就會上升,當溫度過高時,增加電機的速度,制冷作用增強,使房間溫度降低,達到房間內溫度穩定的目的。所以首先要明確被控對象的特點,是要求正作用控制,還是反作用控制。按照說明書進行相關的設置。液位的控制與溫度控制類似,也是反作用控制。
其次,要按照PID的說明書,對被控物理量的量程進行調節,以使被控物理量的傳感器的顯示值(有的傳感器不能顯示,要從附近的機械表上進行讀數),與PID儀表上的顯示值相對應,即調整變送輸出量程和測量量程,與被控物理量一致,才能保證傳感器與儀表一致。
第三,在選擇儀表時也要注意,PID儀表的輸入、輸出要與變送器的輸出、變頻器的輸入相對應,不然就會造成不匹配的情況。是電流信號(一般是4~20mA)就要對應電流信號,是電壓信號(一般是0~5V)就要對應電壓信號,否則將不能形成正常的控制,當然電流信號通過并接電阻可以轉換成電壓信號,但電壓信號要轉化為電流信號就比較困難。
第四,從變送器到PID的信號線要用屏蔽線,屏蔽層要接PID的外殼,以可靠的傳入PID儀表,并盡量遠離高電壓、大電流的主電纜線,防止干擾。若送電后顯示波動仍較大,可調整參數的濾波系數,濾除干擾,使顯示穩定。
第五,PID參數的調整,根據我們對控制原理的分析,可對P、I、D及控制周期t進行調節,以達到系統穩定運行的目的。P為比例帶,減小時,相當于比例增益加大,則靜差系數就會減小,也就是實際值越接近目標值,系統越穩定,反之,系統調節就會減慢,形成在設定值附近振蕩,運行不穩定。I為積分時間,時間越長,積分作用就越強,系統就越穩定,但時間太長,對動態的響應將減弱,也就是在系統物理量急劇變化時,反應慢,不能跟上系統的變化,也會造成調節失敗。一般而言,對于風機、水泵類負載,由于系統相對穩定,只要PI調節一般就可以滿足要求,D積分參數一般是對應快速變化的場合使用,如空壓機,溫控儀等,一般在其他場合關閉即可。
第六,我們比較常用的幾種PID調節器,如XM808-6和香港上潤的WP-90系列,通過大多數場合的使用,基本上總結出一定的規律。初次使用時要打開自整定功能,但自整定一般很難實現較好的控制,一般都需要再調整。通過大多數現場的經驗,對于水泵系列,香港上潤的P一般可設為5以下,3左右,而I一般可調為50-60左右。而XM808-6的一般P設為10左右(在OPAD=3的情況下),I為60左右。D關閉。如山東沾化水庫、青海油田躍進2號注水站、油泉子注水站、山東新泰自來水公司等,基本上就是這樣調節的。但對于風機而言,由于風機的慣性較大,其積分時間就要設定的比較長。如山西鋁廠的引風機自動控制,其積分時間就大約調至300左右。對于空壓機、溫控場合,則需要打開D功能,一般在上述參數的基礎上,適當調節一下,基本就可以達到穩定的控制功能。
第七,當然還可以根據系統或PID具有的參數功能,設定適當的報警或停機功能,即在被控物理量超出規定要求時,提供報警信號,提醒操作人員注意,若再繼續超出,則自動停機,以保護管線或系統,防止損壞。如可設置入口低壓報警,超低壓停機,出口高壓報警,超高壓停機等功能,這都是一些保護功能,可通過外加繼電器或接觸器,實現控制功能。
6
總結
當然,任何系統的調試都要經過比較復雜的過程,雖然我們了解了自動控制的原理,也介紹了相關參數的調試經驗,但對于一個較復雜系統的調試而言,還必須從頭做起,針對每個參數進行耐心細致的調試,直到整個系統穩定的投入運行為目的,最容易出現的問題就是不穩定,變頻器的頻率忽高忽低,壓力或溫度變化大,要根據PID的說明書,詳細的、認真的進行閱讀,并借鑒相關的調試經驗,反復的、細心的進行各個參數的調整,才能達到要求,避免出現不必要的問題,造成整個控制系統的失敗。我們以前也有過很多這方面的教訓,有的也是比較深刻的。希望我們同行的朋友們能及時的總結經驗,互相探討,取長補短,在該領域能深鉆細研,真正把這一系統做好,為國家的節能減排,自動控制系統的完善和提高盡自己的一份努力。






